[ Instrument Network Instrument Development ] Recently, the Associate Research Fellow of the Medical Robot and Minimally Invasive Surgical Instrument Research Center of the Shenzhen Institute of Advanced Technology of the Chinese Academy of Sciences was pleased to develop a new magnetic repulsion non-contact resonant coupling double pyramid dielectric elastomer driver (Magnetically Coupled Dielectric). Elastomer Actuator, MCDEA), the soft drive uses a new electro-magnetic-force coupling mechanism with dual degrees of freedom, compact biomimetic antagonism, high power density and high electromechanical efficiency, and utilizes the drive's own flexibility and flexibility (non-contact) Resonant) coupling and other characteristics to achieve resonant drive, solving the key problem of software driver's power output reduction under high damping load conditions. Relevant research results have been published online in Applied Physics Letters, Advanced Materials Technologies and Physical Review Applied. Cao Chongjing is the first author of the series and is pleased to be the author of the communication.
Software robots have become a hot spot in international research for their superior structure and environmental compliance in the past 10 years. The software robot is composed of soft materials and can adapt to the unstructured unknown environment through its own deformation. It has already shown broad application prospects in many fields such as medical treatment, reconnaissance and disaster relief. Pneumatic software robots are a kind of software robots with relatively mature development and wide application. However, due to the lack of a soft gas pump that can be used in pneumatic software robots, today's pneumatic software robots usually need to be controlled by a hose connected to a large external air pressure control system, which limits their application prospects in many fields, such as remote special robots. Therefore, the power source problem of pneumatic software robots has been plaguing researchers.
Since the embedded rigid-driven air pump will lose the flexibility of the software robot, the soft-body pump needs to be composed of a software driver, and needs to have the structural characteristics of a software robot that is scalable and can be applied to different scales. In terms of function, it needs to have the characteristics of fast flow rate and large output air pressure. Dielectric Elastomer Actuator (DEA) is a new type of software driver with good scalability, excellent output performance and stability. The DEA consists of a dielectric film and flexible electrodes on both sides, as shown in Figure 1. (a). When a certain potential difference is applied to the flexible electrodes on both sides, the resulting Maxwell stress compresses the film, causing the film thickness to decrease while the in-plane area is increased (Fig. 1.(b)). This software-driven principle allows the dielectric elastomer to act as both a film that encloses the pump cavity and as a power source for the pump, ideally suited for use in thin-film fluid pump actuators. However, this design also brings new problems. Since the dielectric elastomer directly works on the compressed air, the damping effect of the compressed air greatly reduces the critical output performance of the pump flow rate, air pressure and energy conversion efficiency. This effect is particularly noticeable under high-frequency driving, and the resonance mechanism of realizing high-frequency resonance and improving output performance by film elasticity cannot be realized.

Figure 1. Dielectric elastomer driver (a) composition and (b) drive mode.
In order to solve this problem, I am pleased to propose the electro-magnetic-force flexible (non-contact) coupling mechanism of double-cone DEA for the first time. A new magnetic repulsion flexible coupling double-cone dielectric elastomer driver (MCDEA, Applied Physics Letters) was developed by Cao Chongjing. ;doi.org/10.1063/1.5071439). As shown in Fig. 2, the MCDEA is flexibly coupled by two plane circular DEAs by magnetic repulsion. Compared to the rigidly coupled biconical DEA, the flexible coupling adds an extra degree of freedom to the system, allowing the two DEAs to be driven independently and coupled by magnetic repulsion. Minimize the effect of the damping effect of the load on the flexible drive: even if one of the DEA is subjected to the damping of the load, it cannot resonate at the natural frequency to improve the output performance, but since the second piece of DEA is not directly in contact with the load, it is not damped. Still able to resonate and work on the first piece of DEA through flexible coupling. Using this core advantage, the development of a flexible drive air pump for software robots was developed. The MCDEA air pump utilizes the resonance principle to greatly improve pump output performance and efficiency. Through measurement, the flow rate of the first generation of small air pump and the output pressure of 42.5 mBar are optimal under the same power and experimental conditions.
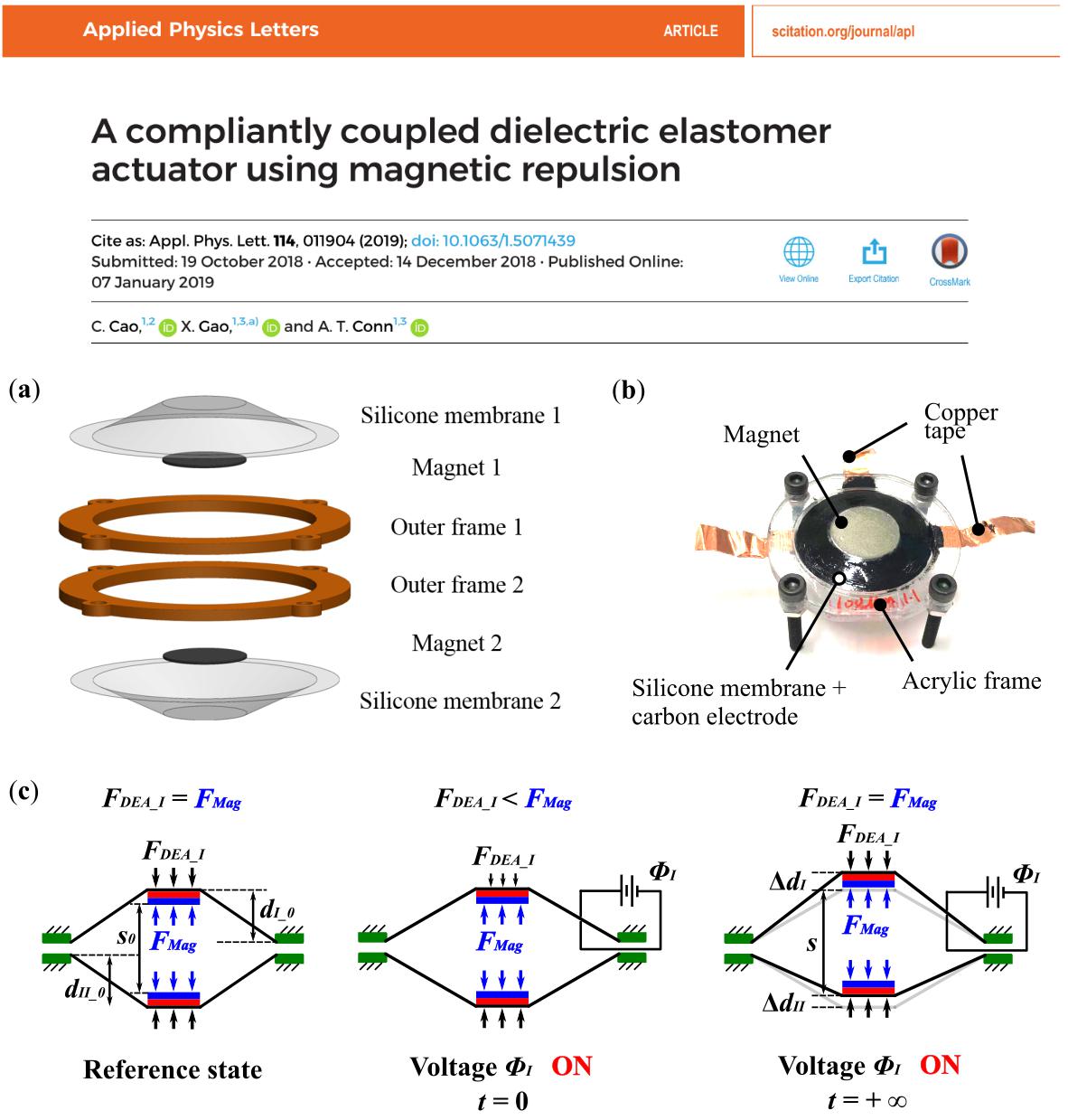
Figure 2. (a) Magnetic Repulsive Flexible Coupling Double Cone Dielectric Elastomer Driver Structure. (b) The physical map of the drive. (c) Driver operating mechanism.
In order to optimize the structure of the MCDEA air pump and verify the output performance of the flexible coupled air pump is the optimality of the current soft fluid pump and reveal more application prospects, the team conducts dynamic model analysis, and the theoretical and experimental results reach more than 95% accuracy. . As shown in Figure 3. This study simplifies the complex nonlinear MCDEA system into a three-spring and two-mass classical dynamic model, and uses the Gent model to describe the superelastic force of the dielectric elastomer, and the Kelvin-Voigt model to describe the viscoelastic force of the film and the flexible electrode. . Under the guidance of this theoretical model, some new phenomena will be expected to be explored and applied: by adjusting the excitation voltage signal to control the output phase difference of two DEA, a new high-frequency vibration control strategy by controlling the phase difference is developed. Controllable acoustic resonance by controlling the frequency difference of the excitation signal, which can be used in shock absorption and acoustic applications of complex systems. This electro-magnetic-force coupling technology will be used in interventional and natural-cavity surgical robots in the future and will be disruptive.
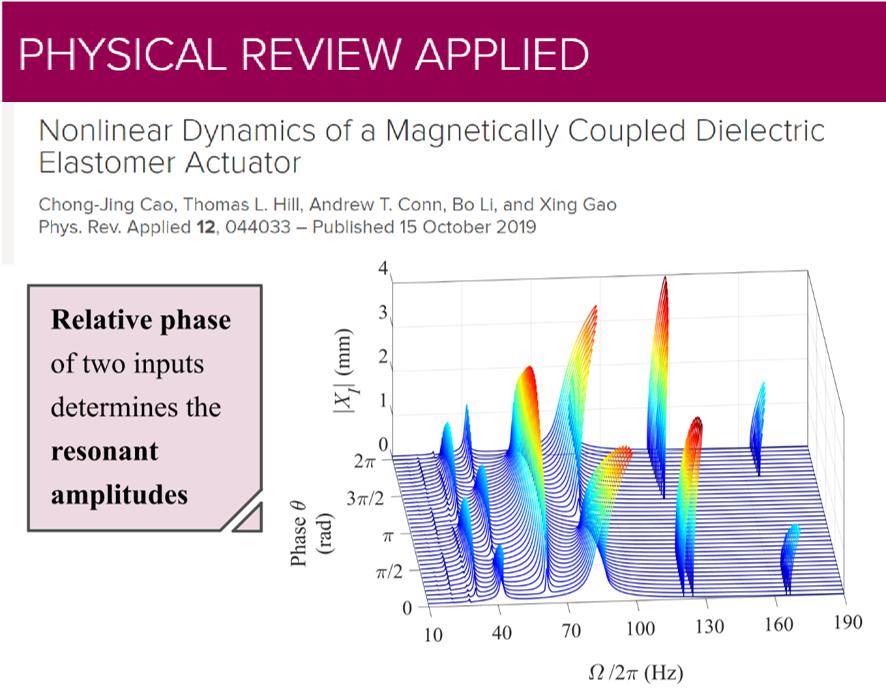
Figure 3. Nonlinear dynamics model of MCDEA and a new high-frequency vibration control strategy
The research was guided by Wang Lei, a researcher at the Shenzhen Institute of Advanced Micro-Invasion, and with the help of Dr. Tom Hill, Andrew Conn of the University of Bristol, and Li Bo, an associate professor at the School of Mechanical Engineering of Xi'an Jiaotong University, and received the National Natural Science Foundation (U1713219) and the country. The Natural Fund (91748124) is funded by the Shenzhen Key Laboratory of Interventional Therapy and Integration of Key Technology and Engineering Laboratory.
Cold Dryer filters
Describe:
The cold drying filter is a kind of cleaning and drying parts to filter the moisture and impurity in refrigerant and keep the refrigeration system clean and dry. When refrigerant contains water and impurity, the system is prone to clog up, ice blocking and so on, thus blocking or partially blocking the refrigerant cycle, which makes the refrigerator lose its refrigeration capacity or the refrigeration effect becomes worse. The drying requirement of refrigeration system is very high and the moisture content in refrigerant per 1kg should not be higher than 20mg. so the drying filter plays an extremely important role in the refrigeration system.
From the aspect of appearance, there are two types of dry filter: single tube type and double tube type. The single-tube drying filter has only one inlet and one outlet. The double-tube drying filter has two entrances and one outlet.
Characteristics:
Water vapor in the air is condensed into water droplets through the principle of cooling. A small amount of oil and impurity can not be removed, so it is necessary to install the water vapor in the air.
The main function of drying filter is to absorb moisture and filter impurities. The dry filter has molecular sieve and filter net, which can absorb and filter the moisture, metal powder and dust contained in the refrigeration system, so as to clean the refrigerant or the compressed air.




Air Precision Filters
Cold Dryer,Cold Dryer Precision Filters,Stainless Steel Cold Dryer Precision Filters,Stainless Steel Cold Dryer
Henan Sinofiltec Technology Co.,Ltd , https://www.airfilters.pl
![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)